* 목표
Realsense D435i 카메라에서 나오는 IMU와 이미지를 바탕으로 VINS 돌리기
* 환경
Ubuntu 20.04
ROS1 Noetic
* 구현
0. Dependencies 설치
* Ceres Solver
sudo apt-get install -y cmake libgoogle-glog-dev libatlas-base-dev libsuitesparse-dev
wget http://ceres-solver.org/ceres-solver-1.14.0.tar.gz
tar zxf ceres-solver-1.14.0.tar.gz
cd ceres-solver-1.14.0
mkdir build && cd build
cmake -DEXPORT_BUILD_DIR=ON \
-DCMAKE_INSTALL_PREFIX=/usr/local \
../
make -j 4 # number of cores
make test -j 4
sudo make install* OpenCV
1. VINS-fusion 설치
기존 VINS-Fusion은 우분투 18.04 버전에 구현되어 있다.
하지만 나는 20.04에서 돌려야 하는 상황이었다.
20.04에서 설치할 경우 opencv 버전 문제로 인해 빌드가 잘 되지 않는다.
(참고)
https://github.com/HKUST-Aerial-Robotics/VINS-Fusion/issues/167
VINS-fusion on Ubuntu 20.04 · Issue #167 · HKUST-Aerial-Robotics/VINS-Fusion
Hello all, I try to use VINS-fusion in my workspace. This is my system setting: Ubuntu 20.04 + opencv_version 4.2.0 + gcc (Ubuntu 9.3.0-17ubuntu1 ~ 20.04) 9.3.0 I have two questions: 1- which versi...
github.com
이를 해결해 놓은 깃을 찾았고, 기존 VINS-Fusion 대신 이 버전으로 설치하였다.
링크는 아래에 있다.
https://github.com/rkuo2000/VINS-Fusion/
GitHub - rkuo2000/VINS-Fusion: An optimization-based multi-sensor state estimator
An optimization-based multi-sensor state estimator - GitHub - rkuo2000/VINS-Fusion: An optimization-based multi-sensor state estimator
github.com
mkdir -p ~/vins_ws/src
cd ~/vins_ws/src
git clone https://github.com/rkuo2000/VINS-Fusion.git
cd ~/vins_ws
catkin build2. Realsense package 설치
sudo apt-get install ros-noetic-realsense2-camera
3. Realsense SDK 설치 및 세팅
[Ubuntu] Realsense SDK(realsense-viewer) 설치
* 출처 https://github.com/IntelRealSense/librealsense/blob/master/doc/distribution_linux.md GitHub - IntelRealSense/librealsense: Intel® RealSense™ SDK Intel® RealSense™ SDK. Contribute to IntelRealSense/librealsense development by creating an acco
yongee.tistory.com
- 이 부분은 실제로 필요한지 검증되지 않음, 추후 생략해도 문제 없는지 확인 필요하나, 일단 설정했을 때 잘 작동했기에 추가
============================================================================================
SDK 실행
realsense-viewer
Emitter Enable 설정을 Off로 변경

이후 설정 파일 저장. 파일명은 vins_setting.json으로 저장
============================================================================================
4. kalibr 설치
Calibration 하기 위한 패키지
아래 명령어를 통해 dependencies 설치
sudo apt-get install -y \
git wget autoconf automake nano \
libeigen3-dev libboost-all-dev libsuitesparse-dev \
doxygen libopencv-dev \
libpoco-dev libtbb-dev libblas-dev liblapack-dev libv4l-dev
sudo apt-get install -y python3-dev python3-pip python3-scipy \
python3-matplotlib ipython3 python3-wxgtk4.0 python3-tk python3-igraph python3-pyx기존 워크스페이스 설정 변경
cd ~/vins_ws
catkin init
catkin config --extend /opt/ros/$ROS1_DISTRO
catkin config --cmake-args -DCMAKE_BUILD_TYPE=Release
cd ~/vins_ws
catkin init
catkin config --extend /opt/ros/$ROS1_DISTRO
catkin config --cmake-args -DCMAKE_BUILD_TYPE=Release
*** 아래의 링크에는 추가되어있으나 vins를 설치한 워크스페이스에 kalibr 설치할 경우 아래 명령어 입력하면 빌드 할 때 에러가 발생하므로 생략함.
#catkin config --merge-devel클론 후 빌드
cd ~/vins_ws/src
git clone https://github.com/ethz-asl/kalibr.git
cd ~/vins_ws
catkin build -DCMAKE_BUILD_TYPE=Release
* 설치 방법 안내
https://github.com/ethz-asl/kalibr/wiki/installation
Installation
The Kalibr visual-inertial calibration toolbox. Contribute to ethz-asl/kalibr development by creating an account on GitHub.
github.com
* 깃허브
https://github.com/ethz-asl/kalibr
GitHub - ethz-asl/kalibr: The Kalibr visual-inertial calibration toolbox
The Kalibr visual-inertial calibration toolbox. Contribute to ethz-asl/kalibr development by creating an account on GitHub.
github.com
* 5. D435i 자체 imu calibration
6. Camera Calibration
(참고 사이트)
https://github.com/engcang/vins-application/tree/Intel-D435i
아래 링크를 눌러 6x6 Apriltag 다운로드
https://drive.google.com/file/d/10zw3LvCDvXYyTQje4Gt4vzJMMYOuGsma/view
april_6x6.yaml
drive.google.com
이후 출력. 원본은 A0이나 여건상 A4로 출력하여 진행함.
7. Calibration 진행하기 위한 설정 파일 작성
* Apriltag
cd ~/data
vi april_6x6.yamlapril_6x6.yaml
target_type: 'aprilgrid' #gridtype
tagCols: 6 #number of apriltags
tagRows: 6 #number of apriltags
tagSize: 0.022 #size of apriltag, edge to edge [m]
tagSpacing: 0.272727 #ratio of space between tags to tagSize
#example: tagSize=2m, spacing=0.5m --> tagSpacing=0.25[-]- tag size와 spacing은 직접 자로 측정하였고, 각 22mm와 6mm이었음.
* IMU
vi imu-params.yamlimu-params.yaml
accelerometer_noise_density: 0.001865 #Noise density (continuous-time)
accelerometer_random_walk: 0.0002 #Bias random walk
#Gyroscopes
gyroscope_noise_density: 0.0018685 #Noise density (continuous-time)
gyroscope_random_walk: 0.000004 #Bias random walk
rostopic: /camera/imu #the IMU ROS topic
update_rate: 400.0 #Hz (for discretization of the values above)출처
https://github.com/engcang/vins-application/tree/Intel-D435i
GitHub - engcang/vins-application: VINS-Fusion, VINS-Fisheye, OpenVINS, EnVIO, ROVIO, ORB-SLAM2, NVIDIA Elbrus application of di
VINS-Fusion, VINS-Fisheye, OpenVINS, EnVIO, ROVIO, ORB-SLAM2, NVIDIA Elbrus application of different sets of cameras and imu on different board including desktop and Jetson boards - GitHub - engcan...
github.com
8. realsense launch파일 작성
roscd realsense2_camera/
cp rs_camera.launch vins_d435i.launch
vi vins_d435i.launch열어서 일부분만 수정
vins_d45i.launch의 일부
<arg name="json_file_path" default="[path-to-jetson]/vins_setting.json"/>
<arg name="enable_infra" default="true"/>
<arg name="enable_infra1" default="true"/>
<arg name="enable_infra2" default="true"/>
<arg name="enable_gyro" default="true"/>
<arg name="enable_accel" default="true"/>
<arg name="unite_imu_method" default="linear_interpolation"/>
9. rosbag 파일 생성
(6)에서 출력한 파일을 평평한 면에 잘 펴놓은 다음 카메라로 녹화 진행

rosbag record /camera/infra1/image_rect_raw /camera/infra2/image_rect_raw /camera/imu
10. Calibration 진행
* Camera Calibration
rosrun kalibr kalibr_calibrate_cameras \
--bag ./data/calib_d435i.bag \
--target ./data/april_6x6.yaml \
--models pinhole-radtan pinhole-radtan \
--topics /camera/infra1/image_rect_raw /camera/infra2/image_rect_raw
* Camera-IMU Calibration
rosrun kalibr kalibr_calibrate_imu_camera \
--bag ./data/calib_d435i.bag \
--target ./data/april_6x6.yaml \
--cam ./data/calib_d435i-camchain.yaml \
--imu ./data/imu-params.yaml
11. Calibration으로 얻은 행렬을 vins 설정 파일에 복사
cd [PATH-TO-VINS-FUSION]/config/realsense_d435i
vi realsense_stereo_imu_config.yaml
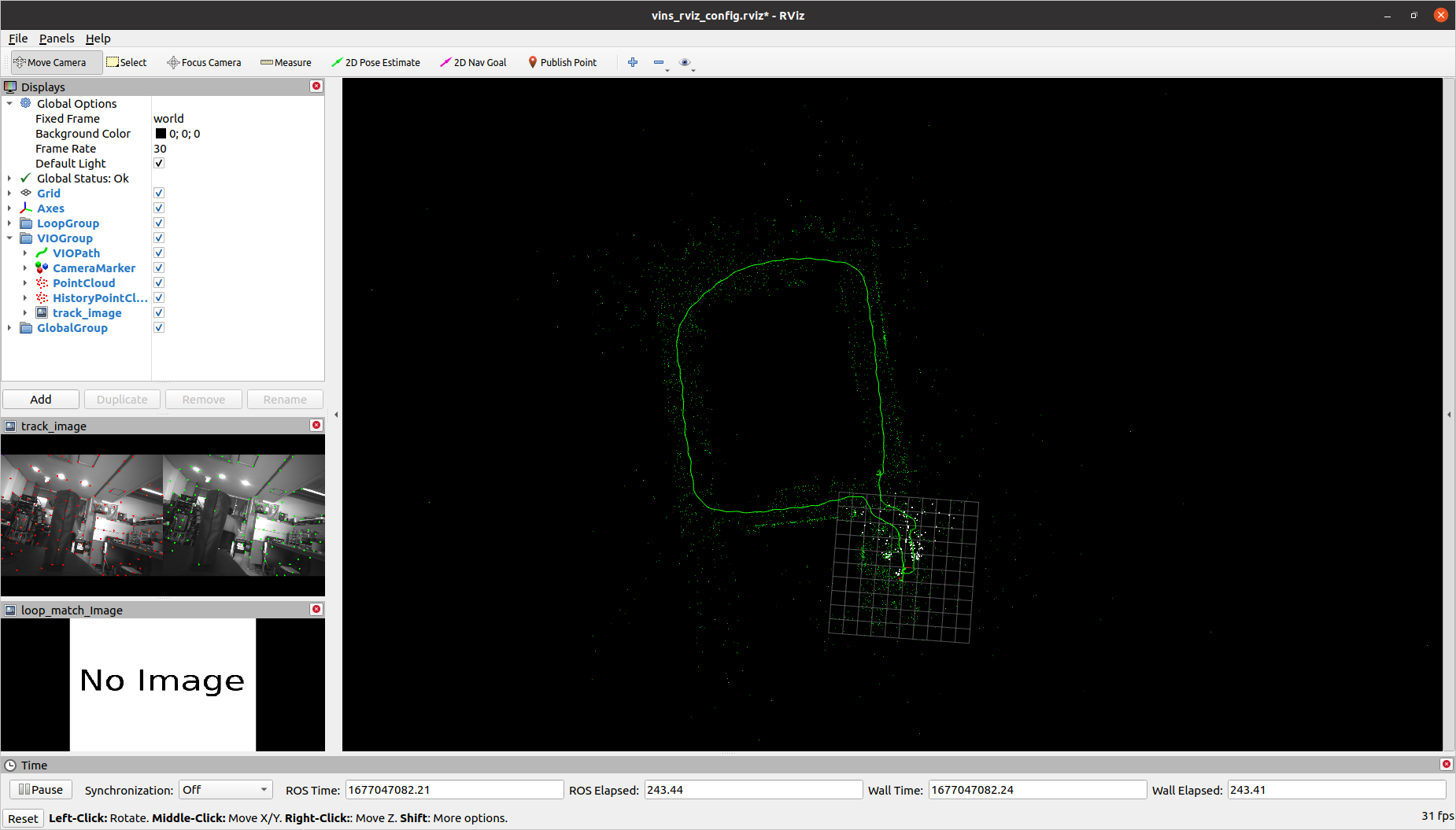
12. 실행
# terminal 1
roscore
# terminal 2
rosrun vins vins_node ~/vins_ws/src/VINS-Fusion/config/realsense_d435i/realsense_stereo_imu_config
# terminal 3
roslaunch vins vins_rviz.launch
# terminal 4
roslaunch realsense2_camera vins_d435i.launch
결과
'VisualSLAM' 카테고리의 다른 글
| [VisualSLAM] ORB_SLAM2 설치 및 실행 (0) | 2022.11.29 |
|---|